Control with collision avoidance¶
We have \(n\) linear dynamic systems, given by
where \(t = 0, 1, \ldots\) denotes (discrete) time, \(x^i_t\) are the states, and \(y^i_t\) are the outputs. At each time \(t\) for \(t = 0, \ldots, T\) the \(n\) outputs \(y^i_t\) are required to keep a distance of at least \(d_{\min}\) from each other.
The initial states \(x^i_0\) and ending states \(x^i_T\) are given by \(x^i_{\text{init}}\) and \(x^i_{\text{end}}\), and the inputs are limited by
We will cp.Minimize a sum of the \(\ell_1\) norms of the inputs, an approximation of fuel use. (Of course we can have any convex state and input constraints, and any convex objective.) This gives the cp.Problem
where \(x^i_t\), \(y^i_t\), and \(u^i_t\) are cp.Variables.
Example¶
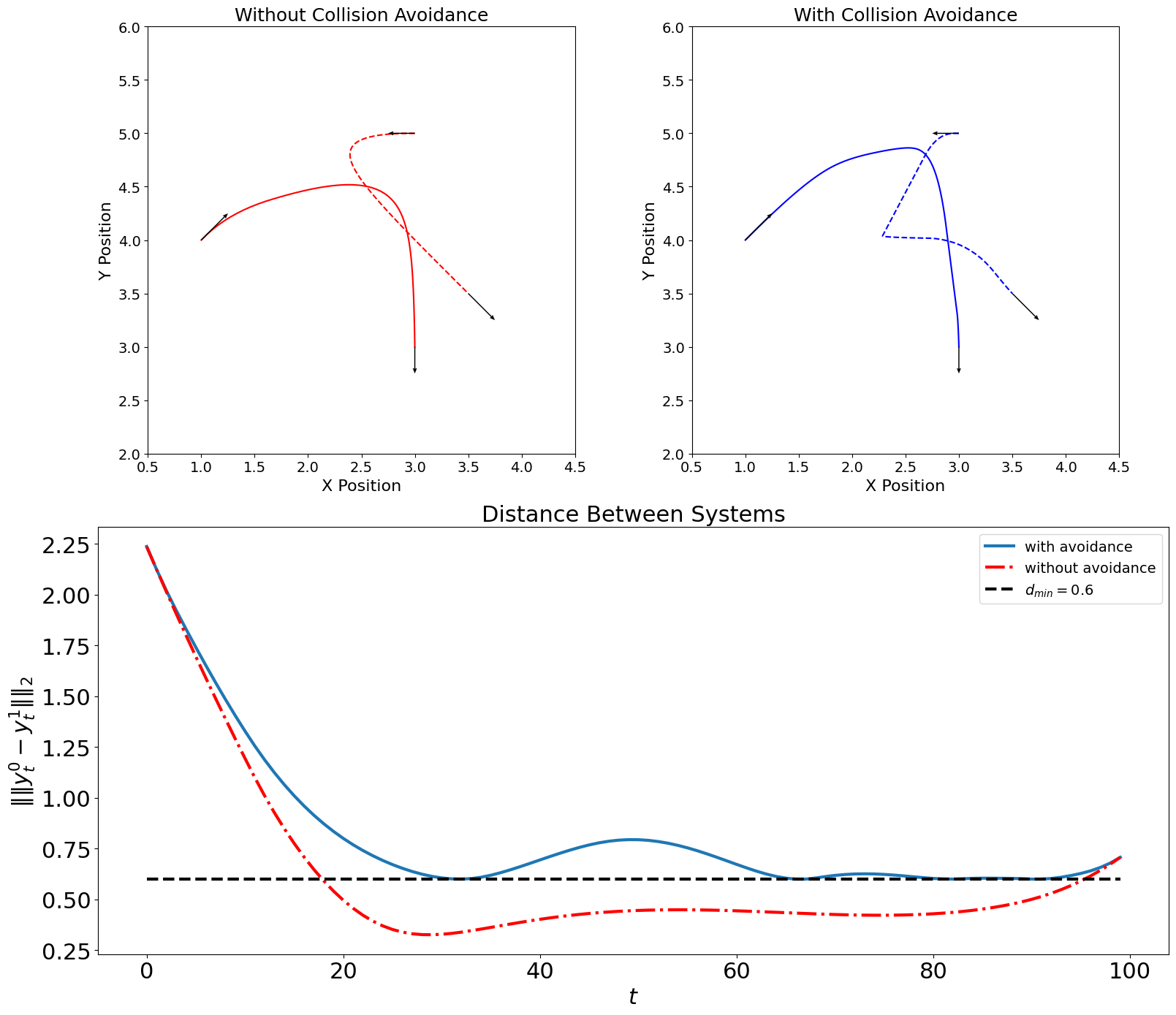
The results are in Figure~4, where the black arrows in the first two figures show initial and final states (position and velocity), and the black dashed line in the third figure shows \(d_{\min}\).
With collision avoidance¶
[1]:
import cvxpy as cp
import matplotlib.pyplot as plt
import numpy as np
from dccp import is_dccp
T = 100
l = 6.0
m = 1
v_max = 0.15
d_min = 0.6
A = np.array([[1, 0, 0.1, 0], [0, 1, 0, 0.1], [0, 0, 0.95, 0], [0, 0, 0, 0.95]])
B = np.array([[0, 0], [0, 0], [0.1 / float(m), 0], [0, 0.1 / float(m)]])
C = np.array([[1, 0, 0, 0], [0, 1, 0, 0]])
d = 2 # dim of space
n = 2 # number of systems
x_ini = np.array([[1, 4, 0.5, 0.5], [3, 5, -0.5, 0]])
x_end = np.array([[3, 3, 0, -0.5], [3.5, 3.5, 0.5, -0.5]])
f_max = 0.5
u = []
y = []
x = []
for i in range(n):
u.append([])
y.append([])
x.append([])
cost = 0
constr = []
for i in range(n):
for t in range(T):
u[i] += [cp.Variable(d)]
constr += [cp.norm(u[i][-1], "inf") <= f_max]
cost += cp.pnorm(u[i][-1], 1)
y[i] += [cp.Variable(d)]
x[i] += [cp.Variable(2 * d)]
constr += [y[i][-1] == C @ x[i][-1]]
constr += [x[i][0] == x_ini[i]]
constr += [x[i][-1] == x_end[i]]
for i in range(n):
for t in range(T - 1):
constr += [x[i][t + 1] == A @ x[i][t] + B @ u[i][t]]
for t in range(T):
for i in range(n - 1):
for j in range(i + 1, n):
constr += [cp.norm(y[i][t] - y[j][t]) >= d_min]
# solve the problem
prob = cp.Problem(cp.Minimize(cost), constr)
assert is_dccp(prob), "Problem is not DCCP"
prob.solve(method="dccp", ep=1e-1)
[1]:
45.280675083592804
Without collision avoidance¶
[2]:
u_c = []
y_c = []
x_c = []
for i in range(n):
u_c.append([])
y_c.append([])
x_c.append([])
cost_c = 0
constr_c = []
for i in range(n):
for t in range(T):
u_c[i] += [cp.Variable(d)]
constr_c += [cp.pnorm(u_c[i][-1], "inf") <= f_max]
cost_c += cp.pnorm(u_c[i][-1], 1)
y_c[i] += [cp.Variable(d)]
x_c[i] += [cp.Variable(2 * d)]
constr_c += [y_c[i][-1] == C @ x_c[i][-1]]
constr_c += [x_c[i][0] == x_ini[i]]
constr_c += [x_c[i][-1] == x_end[i]]
for i in range(n):
for t in range(T - 1):
constr_c += [x_c[i][t + 1] == A @ x_c[i][t] + B @ u_c[i][t]]
prob_c = cp.Problem(cp.Minimize(cost_c), constr_c)
prob_c.solve()
[2]:
np.float64(45.14747057918261)
Visualization of the optimal trajectories¶
[3]:
# Helper functions for plotting
def extract_trajectory(y_vars, system_idx):
"""Extract x and y coordinates from trajectory variables."""
x_coords = [xx.value[0] for xx in y_vars[system_idx]]
y_coords = [xx.value[1] for xx in y_vars[system_idx]]
return x_coords, y_coords
def plot_arrows(x_initial, x_final):
"""Plot initial and final state arrows for all systems."""
for i in range(len(x_initial)):
# initial state
plt.quiver(
x_initial[i][0], x_initial[i][1], x_initial[i][2], x_initial[i][3],
units="xy", scale=2, zorder=3, color="black",
width=0.01, headwidth=4.0, headlength=5.0
)
# final state
plt.quiver(
x_final[i][0], x_final[i][1], x_final[i][2], x_final[i][3],
units="xy", scale=2, zorder=3, color="black",
width=0.01, headwidth=4.0, headlength=5.0
)
def setup_trajectory_plot(title):
"""Setup trajectory plots."""
plt.xlim(0.5, 4.5)
plt.ylim(2, 6)
plt.gca().set_aspect("equal", adjustable="box")
plt.title(title, fontsize=18)
plt.xlabel("X Position", fontsize=16)
plt.ylabel("Y Position", fontsize=16)
plt.tick_params(axis="both", which="major", labelsize=14)
[4]:
plt.figure(figsize=(16, 14))
# Top left subplot: Without collision avoidance
plt.subplot(2, 2, 1)
ax, ay = extract_trajectory(y_c, 0)
bx, by = extract_trajectory(y_c, 1)
plt.plot(ax, ay, "r", label="System 1")
plt.plot(bx, by, "r--", label="System 2")
plot_arrows(x_ini, x_end)
setup_trajectory_plot("Without Collision Avoidance")
# Top right subplot: With collision avoidance
plt.subplot(2, 2, 2)
ax, ay = extract_trajectory(y, 0)
bx, by = extract_trajectory(y, 1)
plt.plot(ax, ay, "b-", label="System 1")
plt.plot(bx, by, "b--", label="System 2")
plot_arrows(x_ini, x_end)
setup_trajectory_plot("With Collision Avoidance")
# Bottom subplot spanning both columns: Distance comparison
plt.subplot(2, 1, 2)
distance = [cp.pnorm(y[0][t] - y[1][t], 2).value for t in range(T)]
distance_c = [cp.pnorm(y_c[0][t] - y_c[1][t], 2).value for t in range(T)]
plt.plot(range(T), distance, label="with avoidance", linewidth=3)
plt.plot(range(T), distance_c, "r-.", label="without avoidance", linewidth=3)
plt.plot(
range(T),
d_min * np.ones((T, 1)),
"k--",
label=f"$d_{{min}} = {d_min}$",
linewidth=3,
)
plt.legend(loc=0, fontsize=14)
plt.ylabel(r"$\|\|y^0_t - y^1_t\|\|_2$", fontsize=22)
plt.xlabel("$t$", fontsize=22)
plt.title("Distance Between Systems", fontsize=22)
plt.tick_params(axis="both", which="major", labelsize=22)
plt.tight_layout()
plt.show()